Where we last left off, I explained the components and basic design ideas behind GIANT ENEMY CRAB 2, one of the antweight (1lb) combat robots I am currently designing so that my bf can compete alongside me at the next tournament. It will be a four wheel drive horizontal spinner, with a wide "crab-like" aesthetic.
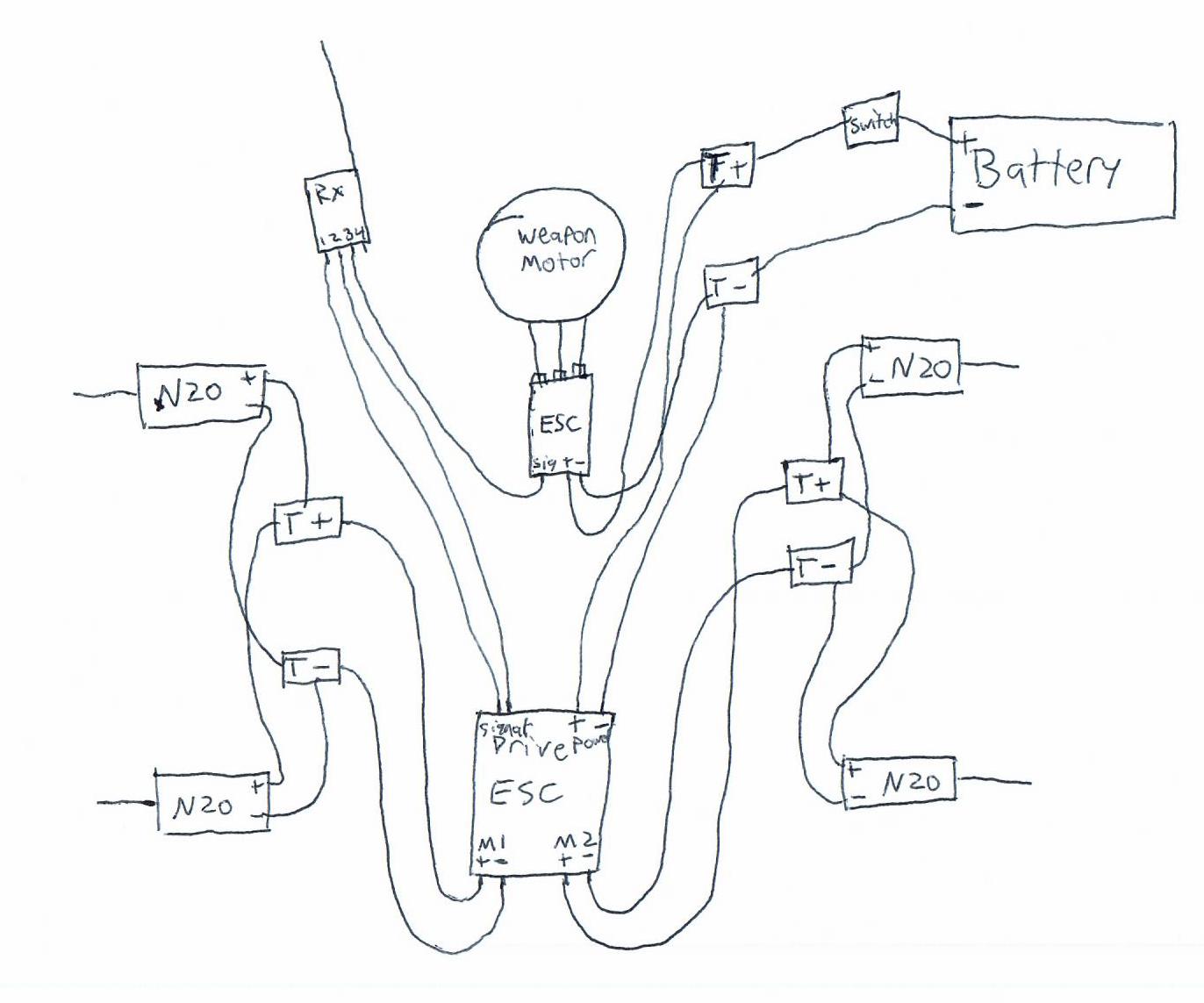
Going off of my previous post, here is the wiring diagram, drawn on paper and then visualized in Fusion360.
{kind=link}
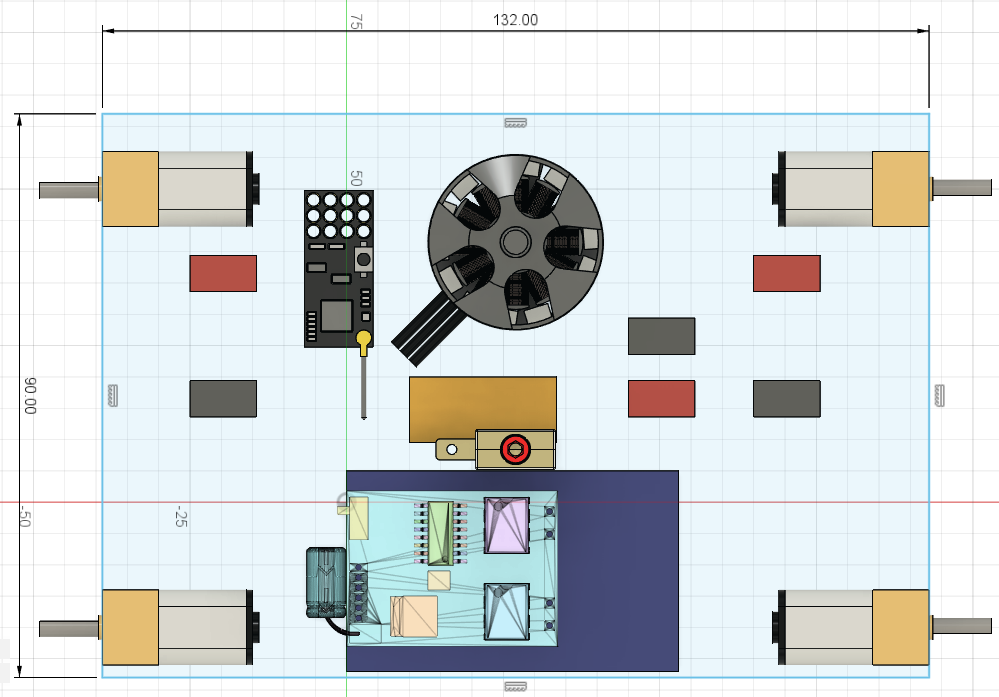
I love Fusion360 as a design tool because it not only allows me to draw and extrude 3d parts, but has the ability to import components that other people have helpfully modeled and uploaded to community libraries for me to use. As you can see here, the motors, receiver, switch and drive ESC are imported models, while the battery, weapon ESC, wheels, and terminals were all drafted by me knowing their dimensions. This ensures that everything will fit properly in the design, with all the screw holes in the right places, etc.
I have arranged the components in a fairly compact fashion, so the next step is to start building the chassis around them. I start with a 3mm floorplate, with holes to mount the MT2204 brushless drone motor to it. This motor will use a pulley system to drive the spinner up front. I have also added 1.5d"x0.5w" wheels onto the drive motors, and adjusted the height so that the robot will have just a couple millimeters of ground clearance. The Ground Game is super important in robot combat, where most of your opponents' strategies will start with getting underneath you. I don't want to scrape the ground with the bot's belly and risk ending up high-centered, but I want to be as low as I comfortably can on the flat wooden arena floor. Initial Chassis
{kind=link}
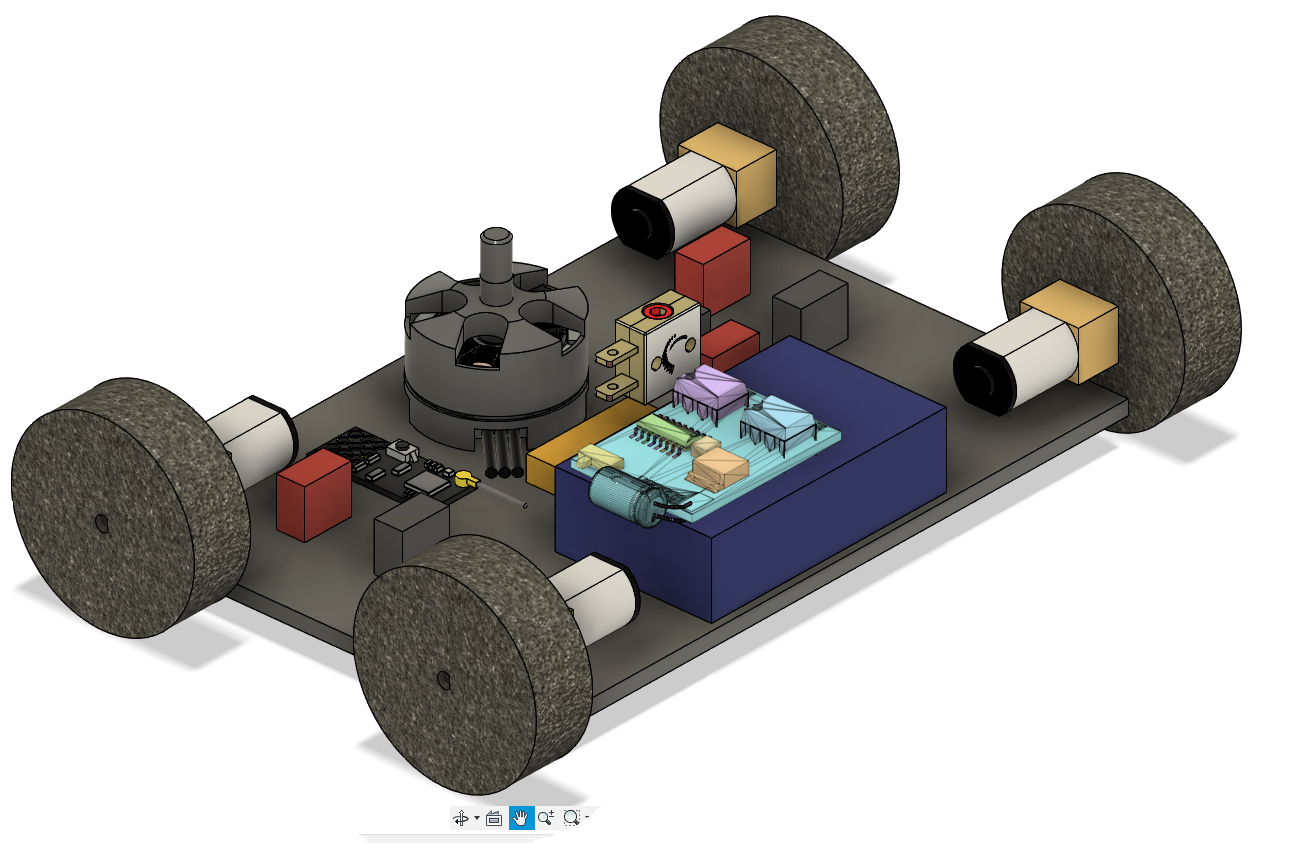
At this point I discover I have made a critical mistake! With the current positioning of the weapon motor and battery, I'm left to either use a very small-radius weapon, or to place the weapon far far in front of the bot, which would throw off my desired weight distribution. "Normal" two-wheel-drive horizontal spinners like Tombstone or Orby are fine having a big weapon way up front and using the weapon shaft as a third "wheel" to balance on, but with this four wheel design, I want the weight distributed among the 4 wheels, with the weapon supported by the whole bot. This will allow me to avoid the friction of the weapon shaft on the floor and hopefully improve the bot's pushing power, which is traditionally a weak point to horizontals.
{kind=link}
{kind=link}
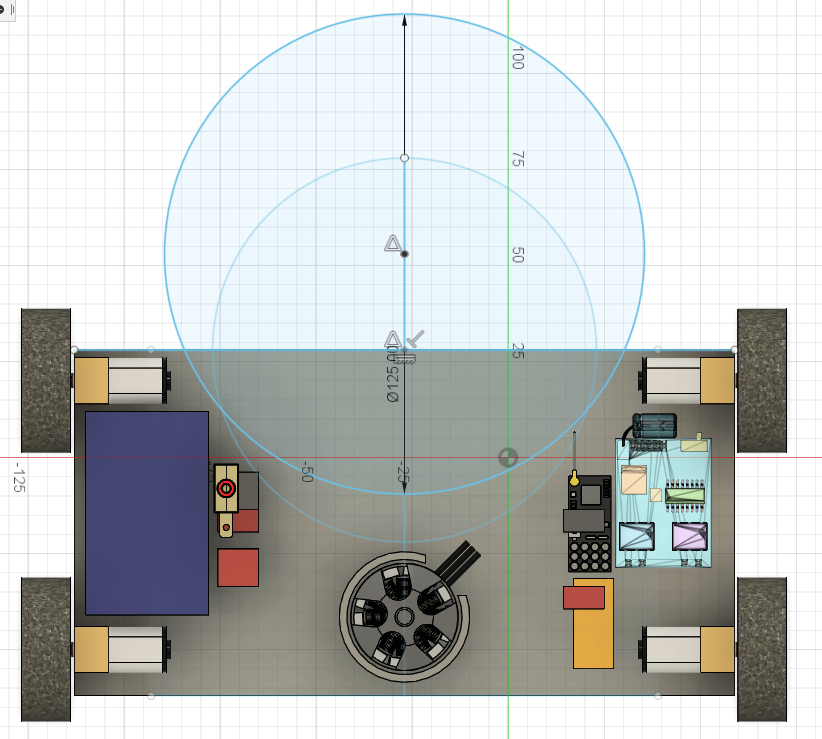
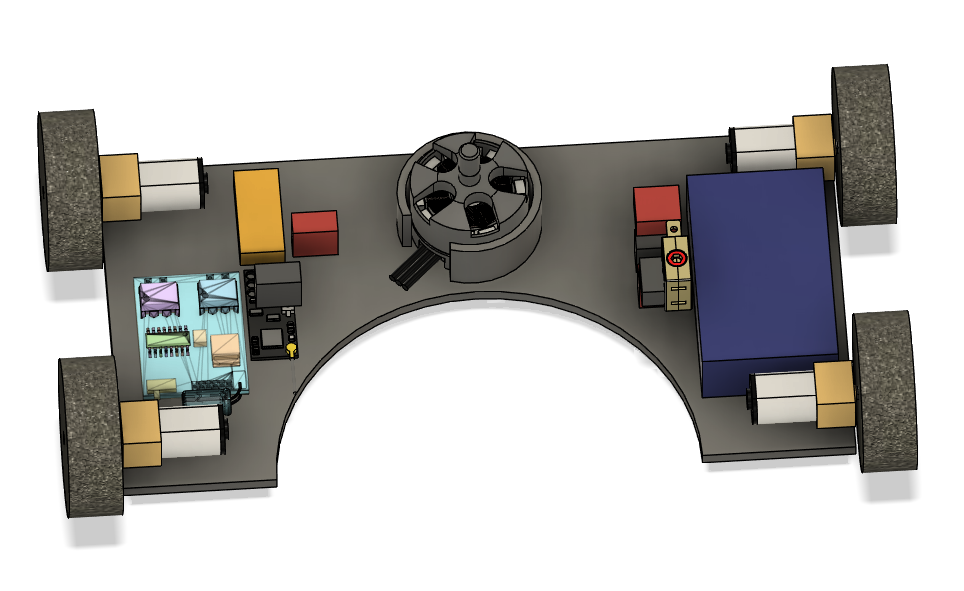
To solve this problem, it was as simple as repositioning the battery, drive ESC and switch to the sides, and allowing the weapon radius to spin deep within the chassis like with the original GIANT ENEMY CRAB.
So here is the new layout for GIANT ENEMY CRAB 2, with the electronics moved to the sides and the chassis widened 40mm to accommodate a larger weapon. The two circles represent potential weapon radii. The smaller circle is 100mm diameter with the center at the front of the current chassis layout, and the larger is 125mm, moved forward 25mm.
{kind=link}
Combat robot spinners in this class usually sit around 60g or so. My other bot JACKALOPE accomplishes this with two small disks side by side for a short, punchy weapon, but for this bot I will design a single-piece weapon with as long a reach as reasonable without throwing off weight balance. My current thinking is that I can get good use out of the 100m weapon combined with some other top secret design features I had in mind. So I cut that radius out so that I can have a good visualization of where the electronics will all fit. So here is the floor of my chassis, which will contain all of the important guts.
{kind=link}
The original GIANT ENEMY CRAB was partially inspired by Malice and similar bots, and that resemblance is coming through pretty strong with this silhouette so far.
{kind=link}
So Wow, this is a lot of words to say "I made the robot's floorplate, except for the weapon part", but it's mostly downhill from here. Next I just need to add some walls and a roof, design a spinner, figure out how it will fit onto the chassis, and hammer out any problems that come up before printing and assembling. Out of these steps, I think I will have the most fun designing the weapon, with the following parameters:
- Weighs approximately 60 grams
- Fits inside a 100mm diameter
- Asymmetrical, with a single striking point for maximum bite
- The hard part: it has to be balanced, so that it doesn't spin itself apart
Next up: The one where spring_rabbit cries to herself softly while running the "center of balance" algorithm for the squillionth time.